基于跨层优化的车道线检测方法
CLRNet: Cross Layer Refinement Network for Lane Detection
车道线检测是无人驾驶系统感知模块的重要功能,由搭载在车身上的视觉摄像头来完成,感知结果常用来进行辅助定位。车道线检测需要有高层次的语义信息,但车道线特征相对简单,需要有低层次的特征来精确定位。并且在港口、城市道路等真实场景中,车道线经常存在破损、被遮挡等情况。
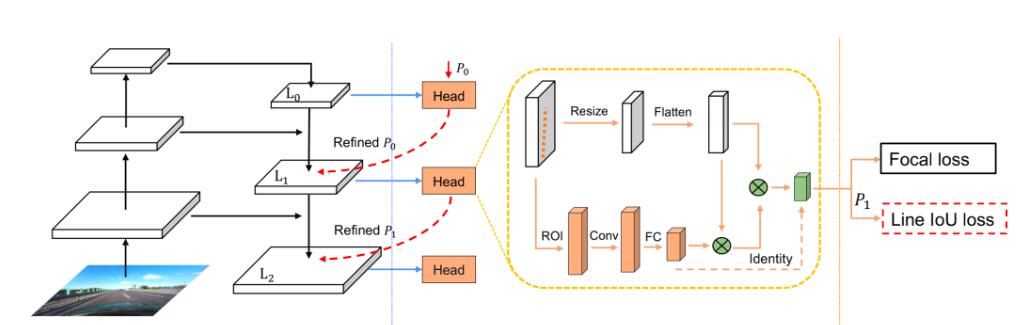
为了解决上述问题,CLRNet提出了一种结合高层次和低层次特征的网络结构,一方面可以感知环境信息,聚集全局特征,另一方面也能结合局部的信息精准定位车道线。并且文章提出一种全新的线段交并比损失函数,进一步提升了车道线的定位精度。简而言之,CLRNet可以帮助无人驾驶系统进行更类人的判断,精准“修补”出因为遮挡和破损而消失的车道线。
基于互中心化学习的少样本分类方法
Learning to Affiliate: Mutual Centralized Learning for Few-shot Classification
对于神经网络来说,需要大量的样本数据来进行学习。现阶段,无人驾驶系统依靠大数据来进行模型学习,并尽可能在较少的样本中去做出分类。传统的方法倾向于使用一个全局特征来密集地表示图像,而不是使用混合的局部特征。但在实际的无人驾驶作业场景中,这样的方法存在着天然的局限性,例如前方车辆车窗挂出了树枝,但无人驾驶系统可能会将车辆误检为一棵树。
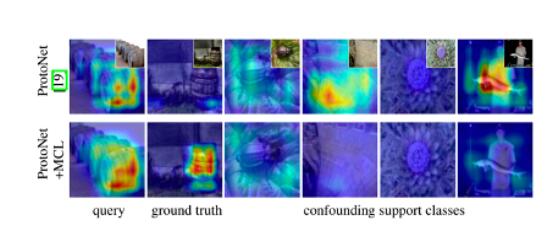
论文提出了一种全新的互中心化的学习(MCL)方法,来更加密切地关联图像局部特征的稠密表示,针对上述Corner Case有着很好的效果。具体而言,论文假设每个局部特征是一个可以在离散特征空间中双向游走的粒子,提出使用局部特征的可达性进行分类任务。论文证明这种方法与关系网络中的中心性存在紧密的联系,且可以通过修改局部特征在全局池化中的权重来得到更加鲁棒的特征表示。经过实验证明,论文方法在各个少样本分类的数据集上达到了最优的效果。
